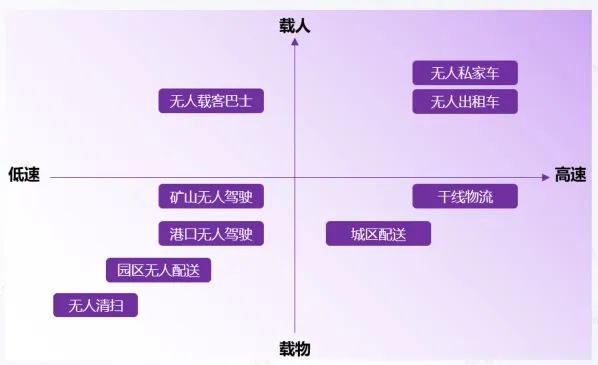
自动驾驶 萝卜快跑 轻舟智航 自动驾驶在争什么 路线之争 Waymo 模式,采用 Waymo 测试为主,技术成熟再谈量产 特斯拉模式,像特斯拉那样以量产为先,通过用户义务贡献测试数据。 纯视觉和融合感知路线 马斯克认为多传感器融合不本质,徒增系统复杂性,这样只用摄像头,比较省成本 而反对方认为纯视觉并不成熟,多传感器是一种安全保障。这样需要更多的传感器 其实争的是量产的成本。轻舟优势 自动驾驶的维度